CtrlWorld清华与斯坦福联合发布具身世界模型
时间:2026-03-22 09:30:01
作者:互联网
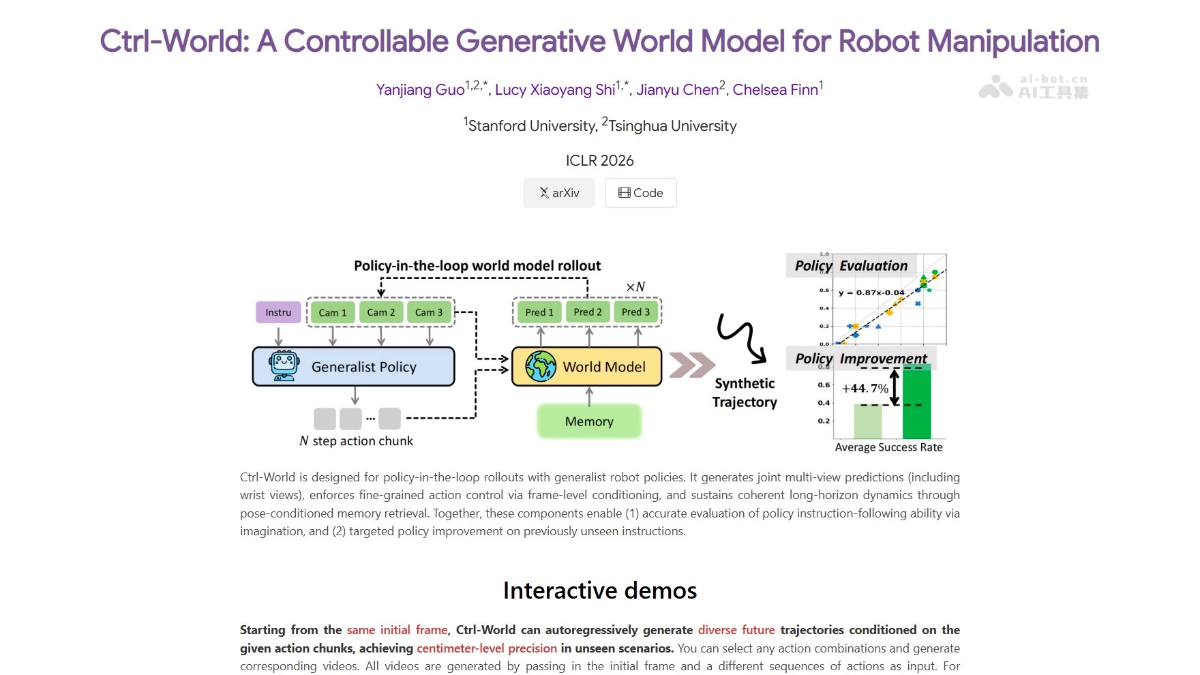
Ctrl-World作为全球领先的具身世界模型,由顶尖科研团队联合研发,在机器人虚拟仿真领域取得突破性进展。该模型通过创新架构实现高精度动作控制,为机器人研发带来革命性变革。
Ctrl-World是什么
这款由国际知名学者团队开发的具身世界模型,在WorldArena评测中展现出卓越性能,斩获具身任务能力全球第一、视频生成质量全球第二的佳绩。其创新性地采用动作条件化架构,将机械臂动作参数直接融入生成过程,实现厘米级轨迹精度。0.986的策略评估一致性和0.93的深度准确性指标,使虚拟测试结果与真实环境高度吻合,为机器人研发提供了高保真数字孪生环境。
Ctrl-World的主要功能
- 策略评估功能允许开发者在虚拟环境中测试机器人策略,其0.986的真实环境一致性评分,显著降低了物理环境搭建成本。
- 基于物理准确的轨迹生成技术,为机器人提供精密动作规划能力,完美支持闭环控制下的复杂操作任务。
- 物理合理的视频-动作数据合成功能,直接解决了传统合成数据"虚拟训练、真实失效"的行业难题。
- 多视图预测能力可联合生成多视角RGB视频、深度图与点云,全面提升机器人的空间感知水平。
Ctrl-World的技术原理
- 动作条件化架构通过显式注入机器人物理参数,建立了动作与状态变化的因果物理链,有效避免了违反物理规律的生成错误。
- 物理引擎约束嵌入技术将牛顿力学定律转化为生成硬约束,确保输出结果不仅视觉真实,更严格遵循质量、摩擦等物理守恒律。
- 记忆增强的多视图预测机制,通过历史帧检索与姿态条件化投影保持时序一致性,同时实现精准的3D空间认知与厘米级轨迹控制。
Ctrl-World的项目地址
- 项目官网:https://ctrl-world.github.io/
- GitHub仓库:https://github.com/Robert-gyj/Ctrl-World
- arXiv技术论文:https://arxiv.org/pdf/2510.10125
Ctrl-World的应用场景
- 虚拟仿真测试场景让开发者无需搭建昂贵物理环境,即可获得可靠的策略评估结果,大幅节省研发投入。
- 策略训练数据合成功能生成的高质量视频-动作序列,直接解决了真实数据采集成本高、效率低的痛点。
- 精密动作规划能力支持机械臂完成抓取、堆叠等高精度操作,并能根据实时反馈动态调整执行方案。
- 多样化场景生成功能助力机器人学习泛化性强的操作技能,轻松应对各种新物体、新环境的挑战。
Ctrl-World凭借其突破性的技术创新,正在重塑机器人研发范式,为行业带来前所未有的高效虚拟仿真解决方案。